以A1-TYPE PLC控制機械臂
一、實習目的
1.瞭解如何利用PLC控制機械臂做夾取物件及翻轉前引的動作。
2.學習在PLC運轉模式下調整時間值,並在運轉模式下除錯。
二、實習器材
1.機械臂 1組
2.機械臂控制箱 1個
3.A1 TYPE可程式控制器
1台
三、實驗原理:
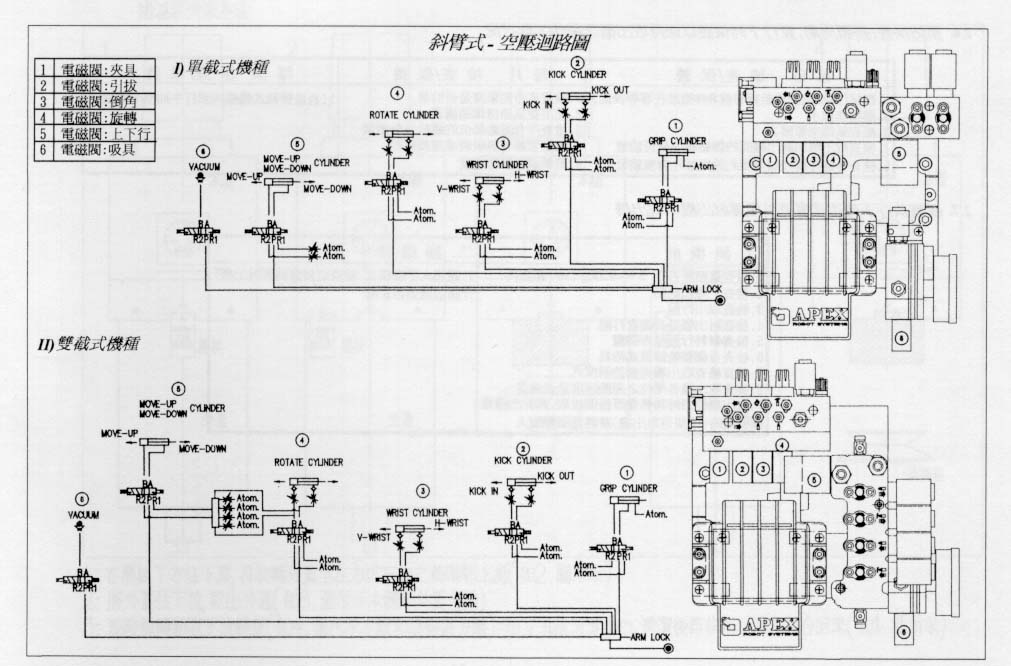
此機械可控制的動作為下行、引拔、倒角、旋出、夾取等,而吸取的動作沒有安裝;輸入訊號有上位、旋入、旋出等訊號,其他訊號沒有安裝感測器,故無作用。因為無夾確訊號的回授,所以只能以Timer調整夾取的時間,程式寫完,須在運轉模式中調整Timer的時間,達到最佳夾取時間,輸入的方法可參考實驗十,(設計方法第五項)。
至於程式在運轉模式下的除錯方法:1.在每一個動作完後多插入行END的指令則可分段縮小除錯的範圍,待每一個動作沒有錯誤後,換插入END指令在下一個動作完(例如在示範程式中,可分成四個組合動作,則可在下降、夾取上昇動作完後,插入END的指令插在OUT 450,K 0.5之後,則程式只會RUN至這個組合動作完後停止,若沒錯誤則將上一END移走,換移至第二個動作要求後,插在OUT 451, K05之後,依此類推,直至錯誤發生為止。如果誤動作發生在第二個動作要求則按CLEAR→451→SEARCH→MONITOR, ON line觀看每一個內部暫存器的值,注視顯示幕上ON or OFF的紅色LED燈。若此內部暫存器已動作,則ON的LED會亮,看是否每一個內部暫存器的狀態,皆符合自己設計的想法。不過程式內容長時,最好還是利用串級步進法來設計,不但程式每一個狀態皆有一個內部暫存器記憶此時的順序,程式較好書寫外,在除錯時也較容易應用以上的方法除錯,不必在自己的腦內Compiler,程式一長就會開始混亂,只要應用以上的方法逐段分縮小範圍,就可以找出錯誤之處。
另外此實驗是利用單動氣壓缸來控制機械臂的動作,若停電時,會自動回到初始狀態,且夾持的物品也會落下,如果需要停電時夾持的物品不能落下,則設計要改成雙動氣壓缸控制,但需再設計回點復歸的副程式。
四、示範程式
(1)
動作要求1.下降、夾取、上昇
2.前行、夾爪旋轉邊旋整個座
3.下降、放開
4.後退、夾爪歸位邊旋整個座回原位
(2)動作時序圖
430:下降
431:引拔 432:旋出434:夾取
400:上位訊號 401:旋入訊號 402:旋出訊號
圖9-1 動作時序圖
(3)實驗接線圖
圖9-2實驗接線圖
(4)程式
圖9-3 程式
五、題目
A.動作要求
下降、垂直前行方向夾取、上昇
前行、夾爪旋轉,一邊旋轉整個機械臂至70度(高)
下降、放開
後退、夾爪歸位,整個機械臂旋轉回原位
解答:
|
LD 400 |
|
|
六、注意事項
2.考慮機械臂是否震動過大及動作是否流暢。
3.在下降,上昇的動作中除夾取的動作外不可外加其他動作否則會造成震動過大。
4.可嘗試使用STL的語污書寫程式。
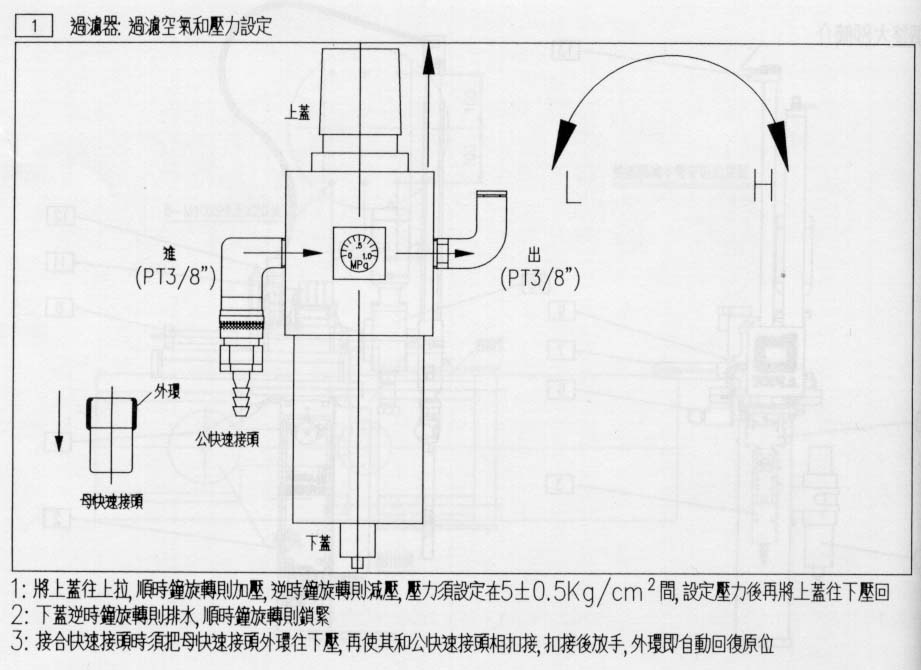
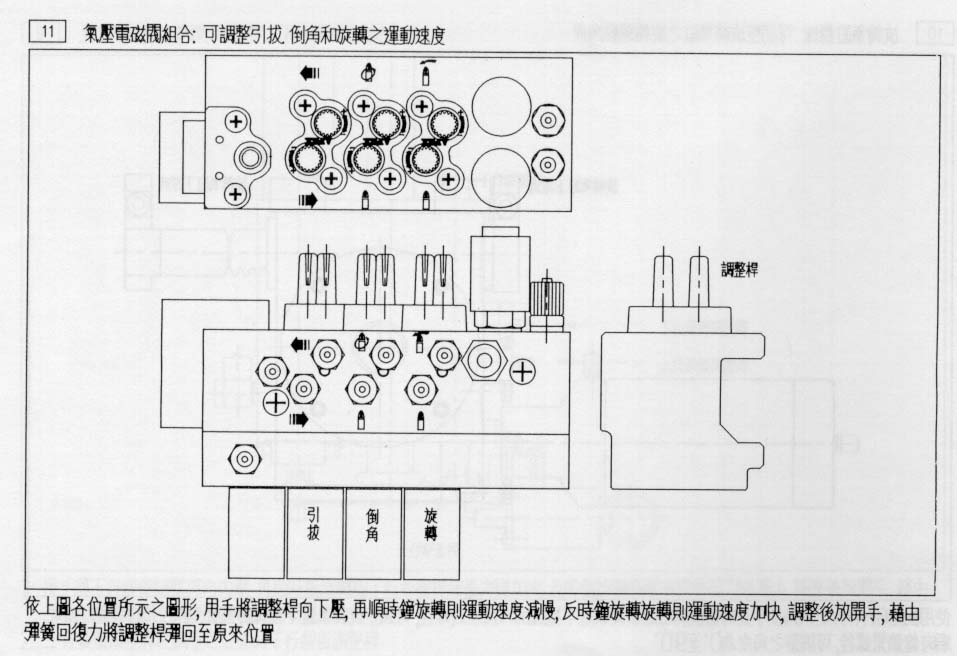
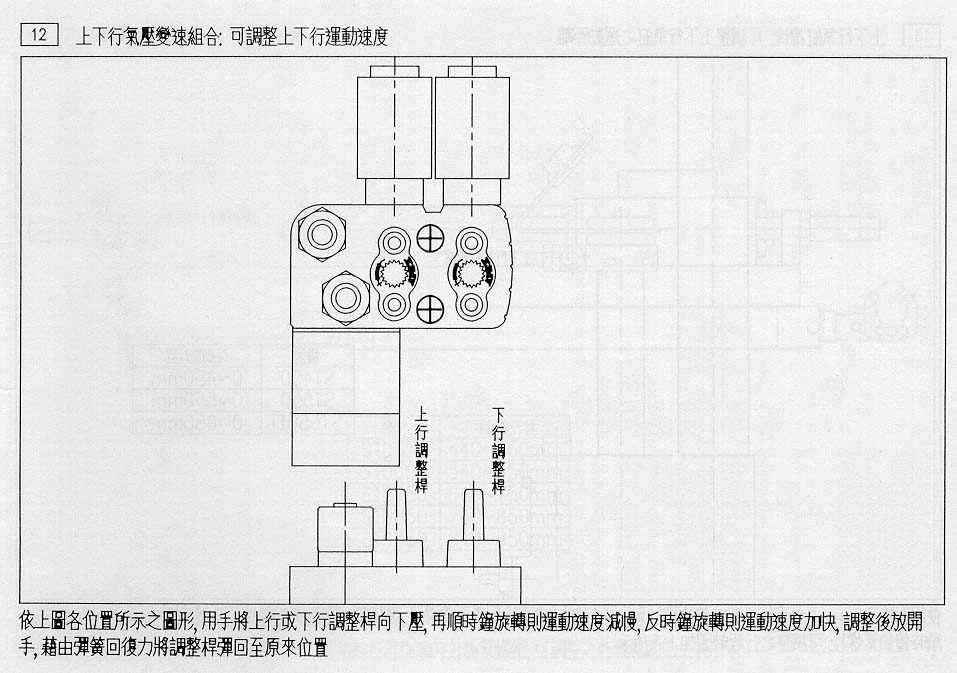
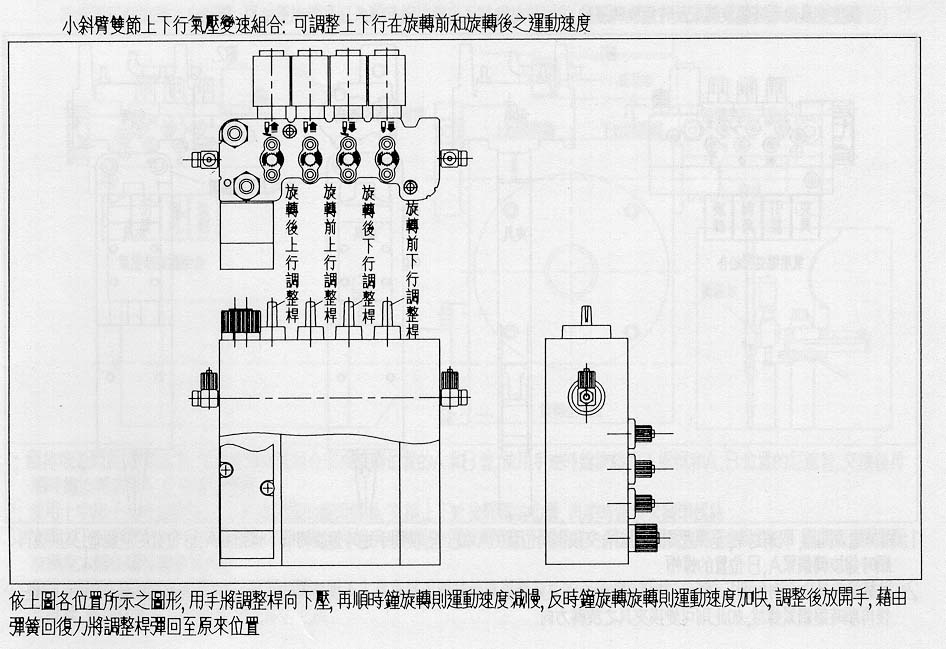
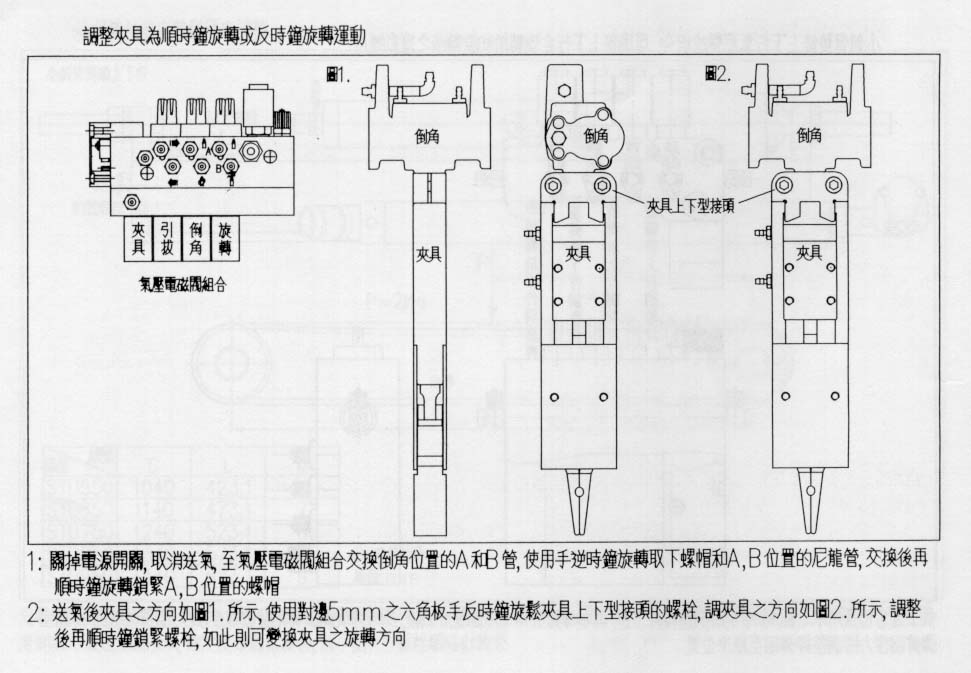
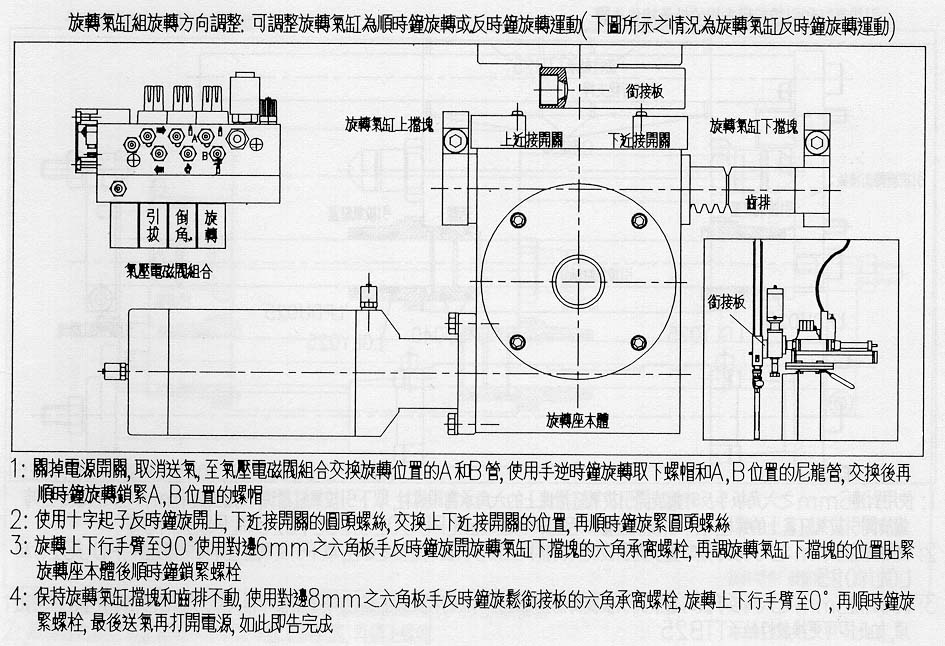
七、附錄(機械臂的硬體調整)