|
|
|
|
|
|
|
|
| 第三章 瞳位線性定位法則
3.1 線性定位原理
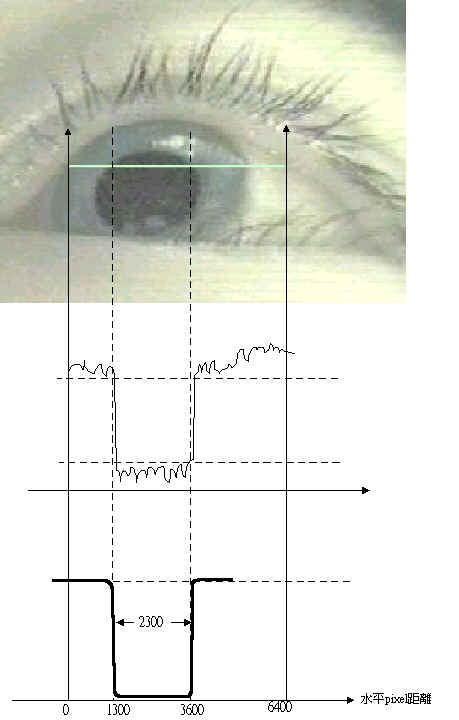
請參閱下圖3.1所示。由於線性感測器所擷取的影像資訊我們是設定為一穿越瞳孔位置的有限水平線段區域(如圖上白線所示),現將線性感測器所感應之電壓訊號值傳入DSP數位信號處理模組來分析,在此我們使用兩個電壓閥值來簡化線性感測器輸入的訊號以方便系統分析處理。 圖3.1下方所示乃是經系統計算分析之後所得的初步結果,我們可以很清楚的從此圖當中分辨出瞳孔在此段一維水平區域內遮蔽的範圍所在,由此我們更可進一步地從這個有限的遮蔽區域中求出瞳孔中心點座標的X軸位置。其次,若將此段水平的遮蔽範圍與線性定位法計算所得的參數互相比對,將可得到瞳孔中心點座標的Y軸位置。 求得瞳孔中心點位置的Y軸及X軸數值,相對的即可計算得知眼球注視前方景觀時的座標位置。因為本檢測系統之線性感測器其架構位置離眼球之距離很短,故其擷取之眼睛影像的解析度極高。而且一般來說,線影像感測器的解析度比面型感測器高,若再經DSP機械碼數值位移之應用下,本檢測系統所搜尋的瞳孔位置解析度將可高達3000x3000左右。如下圖3.1所示,原始影像的灰度訊號在經過DSP數位處理器模組過濾之後,經由系統的閥值二值化之過程,可以得到一簡單的單調二值訊號。透過此一訊號,系統可以很清楚的辨別出哪一部份的區域是座落在瞳孔範圍內,哪一部份是其他低於閥值的區段。 本系統之線性定位法就是採用這種方式,分別將物體中心點的X座標及Y座標求出來之後,即可將物體的二維座標定出來[14]。
|