|
|
|
|
|
|
|
|
| 第四章 系統設備及光學架構
4.4 影像信號前置處理及雜訊過濾
當線影像感測器將掃描到的一維影像信號傳送進DSP處理器之後,此時DSP處理器所接收到的信號資料並非只是CIS所偵測得到的一維信號這麼單純,裡頭還夾雜著有電路傳輸及其他原因所造成的雜訊存在。雖然在電路上,在一維影像信號輸入DSP處理器之前有設計一個雜訊濾波的電路,但是因為CIS本身的頻率就不低,且電路上所造成的雜訊無法百分之百過濾完全的前提之下,我們在程式資料的處理上也必須要有一些雜訊過濾的工作。所以我們在做影像信號前置處理的時候可以同時進行雜訊濾波,以便之後DSP處理器進行線性定位法定位[29]。
4.4.1 一維影像信號
在本系統中,因為我們所採用的是CIS型線影像感測器,此種感測器是一個觸發才偵測一條線的信號,所以就掃描情況而言,它是一條一條掃描線資訊連續傳輸進DSP處理器的,如附錄C所示。
圖4.18所示是CIS把偵測圖4.19所得到的連續一維影像信號傳送進DSP處理器之後的資料所繪製成的圖。我們可以在圖4.18中清楚地觀察出一維影像信號內有一定的重複特徵,諸如數值接近於零的區域;寬度固定且信號雜亂的區域;數值高而平穩且寬度固定的區域等等。所以我們在接收到這一串連續的一維信號之後,首先要做的就是先將同一段掃描線的信號資訊萃取出來。要將這些同一條掃描線訊號從這一大堆信號中萃取出來並不容易,此時我們就要依靠我們觀察到的這些重複特徵來幫我們完成這件工作。 經過一番比對及確認之後,我們成功地透過以上這些特徵將一條掃描線從一維連續訊號中萃取出來。
圖4.20中,下方黑白相間的矩陣是此次測試的掃描樣板,圖4.20上方的波形圖則是一維的影像訊號。在經由特徵比對之後,我們將單純的一條掃描信號萃取出來,在波形圖中我們以淡色的波形表示之。從比對圖中,可以明顯地觀察出此段完整的波形裡遮蔽區域及白色區域所佔的區域大小範圍及其波形狀況[30]。
圖4.21所示是單一掃描線掃描的完整波形,在圖中顏色比較淡的波形區域是CIS掃描到暗色區塊所反應的波形狀況。我們可以觀察到當CIS掃描到暗色區塊的時候,其反應是屬於不規則的信號變化,但在此劇烈的變化當中其波形值仍有一定的上下限。
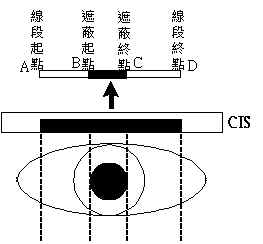
用一維掃描器掃描一個黑色物體或瞳孔的時候,我們所需要最重要的資料訊息不外乎是單一掃描線的開頭、結尾,以及掃描暗色區域時CIS所反應的波形區段之起始點及終點,如圖4.22所示。
若我們能從CIS傳送進DSP處理器的資料中辨別出如圖4.22所示的四點特徵位置ABCD,我們就可計算出掃描線段及遮蔽線段個別的範圍長度,進而代入線性定位法中追蹤定位出瞳孔位置[31]。 |